電(diàn)機(jī)控制線路(lù)圖大全,分析詳細,深度好(hǎo)文(wén)!
 Y-△(星三角)降壓啓動控制線路(lù)-接觸器(qì)應用接線圖
Y-△(星三角)降壓啓動控制線路(lù)-接觸器(qì)應用接線圖
Y-△降壓啓動适用于正常工(gōng)作(zuò)時(shí)定子(zǐ)繞組作(zuò)三角形連接的(de)電(diàn)動機(jī)。由于方法簡便且經濟,所以使用較普遍,但(dàn)啓動轉矩隻有(yǒu)全壓啓動的(de)三分之…,故隻适用于空載或輕載啓動。
Y-△啓動器(qì)有(yǒu)OX3-13、Qx3—30、、Qx3—55、QX3—125型等。OX3後麗(lì)的(de)數字系指額定電(diàn)壓為(wèi)380V時(shí),啓動器(qì)可控制電(diàn)動機(jī)的(de)最大功率值(以kW計(jì))。
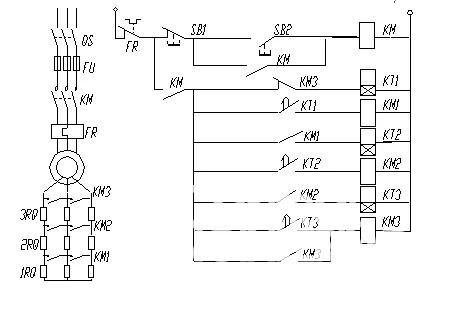
OX3—13型Y-△自(zì)動啓動器(qì)的(de)控制線路(lù)如圖11—11所示。
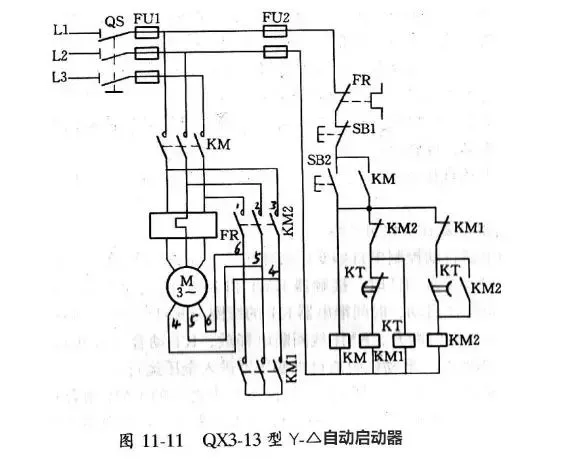
合上(shàng)電(diàn)源開(kāi)關Qs後,按下(xià)啓動按鈕SB2,接觸器(qì)KM和(hé)KMl線圈同時(shí)獲電(diàn)吸合,KM和(hé)KMl主觸頭閉合,電(diàn)動機(jī)接成Y降壓啓動,與此同時(shí),時(shí)間(jiān)繼電(diàn)器(qì)KT的(de)線圈同時(shí)獲電(diàn)。
星形——三角形降壓起動控制線路(lù)
星形——三角形( Y —△)降壓起動是指電(diàn)動機(jī)起動時(shí),把定子(zǐ)繞組接成星形,以降低(dī)起動電(diàn)壓,減小(xiǎo)起動電(diàn)流;待電(diàn)動機(jī)起動後,再把定子(zǐ)繞組改接成三角形,使電(diàn)動機(jī)全壓運行。 Y —△起動隻能用于正常運行時(shí)為(wèi)△形接法的(de)電(diàn)動機(jī)。
1.按鈕、接觸器(qì)控制 Y —△降壓起動控制線路(lù)
圖 2.19 ( a )為(wèi)按鈕、接觸器(qì)控制 Y —△降壓起動控制線路(lù)。線路(lù)的(de)工(gōng)作(zuò)原理(lǐ)為(wèi):按下(xià)起動按鈕 SB1 , KM1 、 KM2 得電(diàn)吸合, KM1 自(zì)鎖,電(diàn)動機(jī)星形起動,待電(diàn)動機(jī)轉速接近(jìn)額定轉速時(shí),按下(xià) SB2 , KM2 斷電(diàn)、 KM3 得電(diàn)并自(zì)鎖,電(diàn)動機(jī)轉換成三角形全壓運行。
2.時(shí)間(jiān)繼電(diàn)器(qì)控制 Y —△降壓起動控制線路(lù)
圖 2.19 ( b )為(wèi)時(shí)間(jiān)繼電(diàn)器(qì)自(zì)動控制 Y —△降壓起動控制線路(lù),電(diàn)路(lù)的(de)工(gōng)作(zuò)原理(lǐ)為(wèi):按下(xià)起動按鈕 SB1 , KM1 、 KM2 得電(diàn)吸合,電(diàn)動機(jī)星形起動,同時(shí) KT 也得電(diàn),經延時(shí)後時(shí)間(jiān)繼電(diàn)器(qì) KT 常閉觸頭打開(kāi),使得 KM2 斷電(diàn),常開(kāi)觸頭閉合,使得 KM3 得電(diàn)閉合并自(zì)鎖,電(diàn)動機(jī)由星形切換成三角形正常運行。
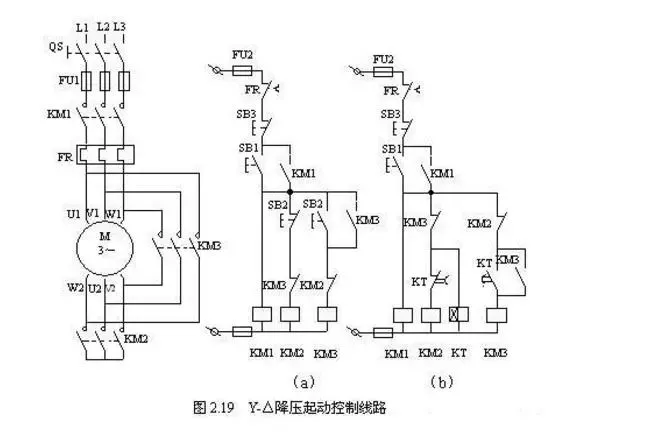
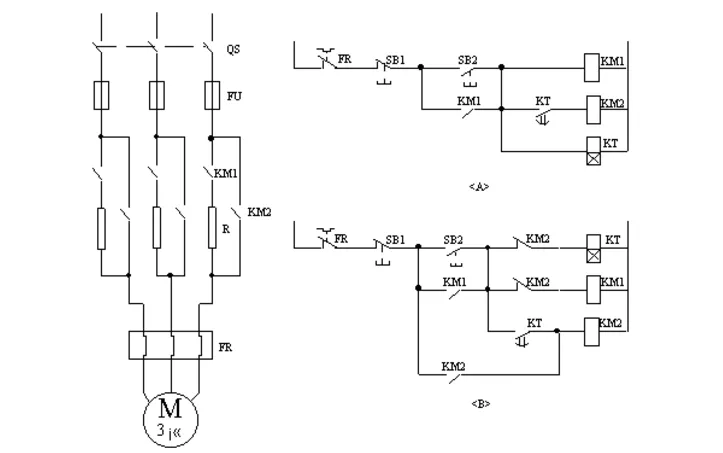
圖1 定子(zǐ)串電(diàn)阻降壓起動控制線路(lù)
圖1是定子(zǐ)串電(diàn)阻降壓起動控制線路(lù)。電(diàn)動機(jī)起動時(shí)在三相(xiàng)定子(zǐ)電(diàn)路(lù)中串接電(diàn)阻,使電(diàn)動機(jī)定子(zǐ)繞組電(diàn)壓降低(dī),起動後再将電(diàn)阻短路(lù),電(diàn)動機(jī)仍然在正常電(diàn)壓下(xià)運行。這(zhè)種起動方式由于不受電(diàn)動機(jī)接線形式的(de)限制,設備簡單,因而在中小(xiǎo)型機(jī)床中也有(yǒu)應用。機(jī)床中也常用這(zhè)種串接電(diàn)阻的(de)方法限制點動調整時(shí)的(de)起動電(diàn)流。
圖1(A)控制線路(lù)的(de)工(gōng)作(zuò)過程如下(xià):
按SB2 KM1得電(diàn)(電(diàn)動機(jī)串電(diàn)阻啓動)
KT 得電(diàn) (延時(shí)) KM2得電(diàn)(短接電(diàn)阻,電(diàn)動機(jī)正常運行)
按SB1,KM2斷電(diàn),其主觸點斷開(kāi),電(diàn)動機(jī)停車。
隻要KM2得電(diàn)就能使電(diàn)動機(jī)正常運行。但(dàn)線路(lù)圖(A)在電(diàn)動機(jī)起動後KM1與KT一直得電(diàn)動作(zuò),這(zhè)是不必要的(de)。線路(lù)圖(B)就解決了這(zhè)個(gè)問(wèn)題,接觸器(qì)KM2得電(diàn)後,其動斷觸點将KM1及KT斷電(diàn)控制工(gōng)程網版權所有(yǒu),KM2自(zì)鎖。這(zhè)樣,在電(diàn)動機(jī)起動後,隻要KM2得電(diàn),電(diàn)動機(jī)便能正常運行。
串電(diàn)阻起動的(de)優點是控制線路(lù)結構簡單,成本低(dī),動作(zuò)可靠,提高(gāo)了功率因數,有(yǒu)利于保證電(diàn)網質量。但(dàn)是控制工(gōng)程網版權所有(yǒu),由于定子(zǐ)串電(diàn)阻降壓起動,起動電(diàn)流随定子(zǐ)電(diàn)壓成正比下(xià)降,而起動轉矩則按電(diàn)壓下(xià)降比例的(de)平方倍下(xià)降。同時(shí),每次起動都(dōu)要消耗大量的(de)電(diàn)能。因此,三相(xiàng)鼠籠式異步電(diàn)動機(jī)采用電(diàn)阻降壓的(de)起動方法,僅适用于要求起動平穩的(de)中小(xiǎo)容量電(diàn)動機(jī)以及起動不頻(pín)繁的(de)場(chǎng)合。大容量電(diàn)動機(jī)多采用串電(diàn)抗降壓起動。
鼠籠式異步電(diàn)動機(jī)全壓啓動控制線路(lù)在許多工(gōng)礦企業(yè)中,鼠籠式異步電(diàn)動機(jī)的(de)數量占電(diàn)力拖動設備總數的(de)85%左右。在變壓器(qì)容量允許的(de)情況下(xià),鼠籠式異步電(diàn)動機(jī)應該盡可能采用全電(diàn)壓直接起動,既可以提高(gāo)控制線路(lù)的(de)可靠性,又(yòu)可以減少電(diàn)器(qì)的(de)維修工(gōng)作(zuò)量。
電(diàn)動機(jī)單向起動控制線路(lù)常用于隻需要單方向運轉的(de)小(xiǎo)功率電(diàn)動機(jī)的(de)控制。例如小(xiǎo)型通(tōng)風(fēng)機(jī)、水(shuǐ)泵以及皮帶運輸機(jī)等機(jī)械設備。圖1是電(diàn)動機(jī)單向起動控制線路(lù)的(de)電(diàn)氣原理(lǐ)圖。這(zhè)是一種最常用、最簡單的(de)控制線路(lù),能實現(xiàn)對(duì)電(diàn)動機(jī)的(de)起動、停止的(de)自(zì)動控制、遠(yuǎn)距離控制、頻(pín)繁操作(zuò)等。
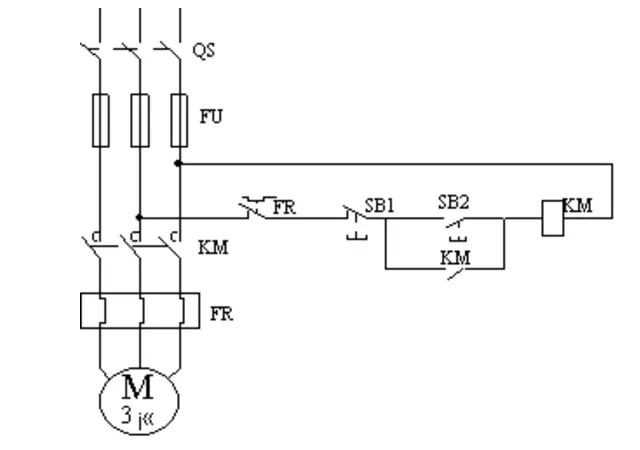
圖2 單向運行電(diàn)氣控制線路(lù)
在圖2中,主電(diàn)路(lù)由隔離開(kāi)關QS、熔斷器(qì)FU、接觸器(qì)KM的(de)常開(kāi)主觸點,熱繼電(diàn)器(qì)FR的(de)熱元件(jiàn)和(hé)電(diàn)動機(jī)M組成。控制電(diàn)路(lù)由起動按鈕SB2、停止按鈕SB1、接觸器(qì)KM線圈和(hé)常開(kāi)輔助觸點、熱繼電(diàn)器(qì)FR的(de)常閉觸頭構成。
控制線路(lù)工(gōng)作(zuò)原理(lǐ)為(wèi):
1、起動電(diàn)動機(jī)合上(shàng)三相(xiàng)隔離開(kāi)關QS,按起動按鈕SB2,按觸 器(qì)KM的(de)吸引線圈得電(diàn),3對(duì)常開(kāi)主觸點閉合,将電(diàn)動機(jī)M接入電(diàn)源,電(diàn)動機(jī)開(kāi)始起動。同時(shí),與SB2并聯的(de)KM的(de)常開(kāi)輔助觸點閉合,即使松手斷開(kāi)SB2,吸引線圈KM通(tōng)過其輔助觸點可以繼續保持通(tōng)電(diàn),維持吸合狀态。凡是接觸器(qì)(或繼電(diàn)器(qì))利用自(zì)己的(de)輔助觸點來(lái)保持其線圈帶電(diàn)的(de),稱之為(wèi)自(zì)鎖(自(zì)保)。這(zhè)個(gè)觸點稱為(wèi)自(zì)鎖(自(zì)保)觸點。由于KM的(de)自(zì)鎖作(zuò)用,當松開(kāi)SB2後,電(diàn)動機(jī)M仍能繼續起動,最後達到穩定運轉。
2、停止電(diàn)動機(jī) 按停止按鈕SB1控制工(gōng)程網版權所有(yǒu),接觸器(qì)KM的(de)線圈失電(diàn),其主觸點和(hé)輔助觸點均斷開(kāi),電(diàn)動機(jī)脫離電(diàn)源,停止運轉。這(zhè)時(shí)即使松開(kāi)停止按鈕,由于自(zì)鎖觸點斷開(kāi),接觸器(qì)KM線圈不會再通(tōng)電(diàn),電(diàn)動機(jī)不會自(zì)行起動。隻有(yǒu)再次按下(xià)起動按鈕SB2時(shí),電(diàn)動機(jī)方能再次起動運轉。
也可以用下(xià)述方式描述:
合上(shàng)開(kāi)關QS
起動→KM主觸點閉點→電(diàn)動機(jī)M得電(diàn)起動、運行
按下(xià)SB2→KM線圈得電(diàn)—→KM常開(kāi)輔助觸點閉合→實現(xiàn)自(zì)保
停車→KM主觸點複位→電(diàn)動機(jī)M斷電(diàn)停車
按下(xià)SB1→KM線圈失電(diàn)—→ KM常開(kāi)輔助觸點複位→自(zì)保解除
串自(zì)耦變壓器(qì)降壓起動控制線路(lù)在自(zì)耦變壓器(qì)降壓起動的(de)控制線路(lù)中,限制電(diàn)動機(jī)起動電(diàn)流是依靠自(zì)耦變壓器(qì)的(de)降壓作(zuò)用來(lái)實現(xiàn)的(de)。自(zì)耦變壓器(qì)的(de)初級和(hé)電(diàn)源相(xiàng)接,自(zì)耦變壓器(qì)的(de)次級與電(diàn)動機(jī)相(xiàng)聯。自(zì)耦變壓器(qì)的(de)次級一般有(yǒu)3個(gè)抽頭,可得到3種數值不等的(de)電(diàn)壓。使用時(shí),可根據起動電(diàn)流和(hé)起動轉矩的(de)要求靈活選擇。電(diàn)動機(jī)起動時(shí),定子(zǐ)繞組得到的(de)電(diàn)壓是自(zì)耦變壓器(qì)的(de)二次電(diàn)壓,一旦起動完畢,自(zì)耦變壓器(qì)便被切除,電(diàn)動機(jī)直接接至電(diàn)源,即得到自(zì)耦變壓器(qì)的(de)一次電(diàn)壓,電(diàn)動機(jī)進入全電(diàn)壓運行。通(tōng)常稱這(zhè)種自(zì)耦變壓器(qì)為(wèi)起動補償器(qì)。這(zhè)一線路(lù)的(de)設計(jì)思想和(hé)串電(diàn)阻起動線路(lù)基本相(xiàng)同,都(dōu)是按時(shí)間(jiān)原則來(lái)完成電(diàn)動機(jī)起動過程的(de)。
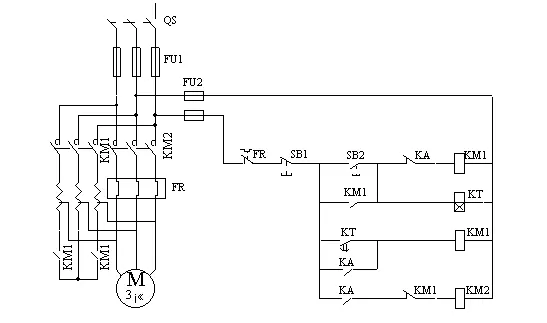
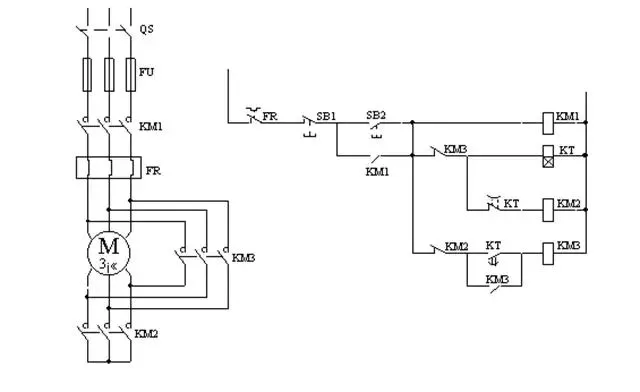
圖4 Y—△降壓起動控制線路(lù)
工(gōng)作(zuò)原理(lǐ):
按下(xià)起動按鈕SB2,接觸器(qì)KM1線圈得電(diàn),電(diàn)動機(jī)M接入電(diàn)源。同時(shí),時(shí)間(jiān)繼電(diàn)器(qì)KT及接觸器(qì)KM2線圈得電(diàn)。
接觸器(qì)KM2線圈得電(diàn),其常開(kāi)主觸點閉合,電(diàn)動機(jī)M定子(zǐ)繞組在星形連接下(xià)運行。KM2的(de)常閉輔助觸點斷開(kāi),保證了接觸器(qì)KM3不得電(diàn)。
時(shí)間(jiān)繼電(diàn)器(qì)KT的(de)常開(kāi)觸點延時(shí)閉合;常閉觸點延時(shí)繼開(kāi),切斷KM2線圈電(diàn)源,其主觸點斷開(kāi)而常閉輔助觸點閉合。
接觸器(qì)KM3線圈得電(diàn),其主觸點閉合,使電(diàn)動機(jī)M由星形起動切換為(wèi)三角形運行。
停車:按SB1 輔助電(diàn)路(lù)斷電(diàn),各接觸器(qì)釋放(fàng)、電(diàn)動機(jī)斷電(diàn)停車
線路(lù)在KM2與KM3之間(jiān)設有(yǒu)輔助觸點聯鎖,防止它們同時(shí)動作(zuò)造成短路(lù);此外(wài),線路(lù)轉入三角接運行後,KM3的(de)常閉觸點分斷,切除時(shí)間(jiān)繼電(diàn)器(qì)KT、接觸器(qì)KM2,避免KT、KM2線圈長(cháng)時(shí)間(jiān)運行而空耗電(diàn)能,并延長(cháng)其壽命。
三相(xiàng)鼠籠式異步電(diàn)動機(jī)采用Y—△降壓起動的(de)優點在于:定子(zǐ)繞組星形接法時(shí),起動電(diàn)壓為(wèi)直接采用三角形接法時(shí)的(de)1/3,起動電(diàn)流為(wèi)三角形接法時(shí)的(de)1/3,因而起動電(diàn)流特性好(hǎo),線路(lù)較簡單,投資少。其缺點是起動轉矩也相(xiàng)應下(xià)降為(wèi)三角形接法的(de)1/3,轉矩特性差。所以該線路(lù)适用于輕載或空載起動的(de)場(chǎng)合。另外(wài)應注意,Y—△聯接時(shí)要注意其旋轉方向的(de)一緻性。
△—△降壓起動控制線路(lù)線路(lù)設計(jì)思想:
如前所述,Y—△降壓起動有(yǒu)很(hěn)多優點,但(dàn)美(měi)中不足的(de)是起動轉矩太小(xiǎo)。能否設計(jì)一種新的(de)降壓起動方法,既具有(yǒu)星形接法起動電(diàn)流小(xiǎo),又(yòu)不需要專用起動設備,同時(shí)又(yòu)具有(yǒu)三角形接法起動轉矩大的(de)優點,以期完成更為(wèi)理(lǐ)想的(de)起動過程呢(ne)?△—△降壓起動便能滿足這(zhè)種要求。在起動時(shí),将電(diàn)動機(jī)定子(zǐ)繞組一部分接成星形,另一部分接成三角形。待起動結束後,再轉換成三角形接法,轉換過程仍按照(zhào)時(shí)間(jiān)原則來(lái)控制。從(cóng)圖5中的(de)繞組接線看(kàn),就是一個(gè)三角形3條邊的(de)延長(cháng),故也稱延邊三角形。
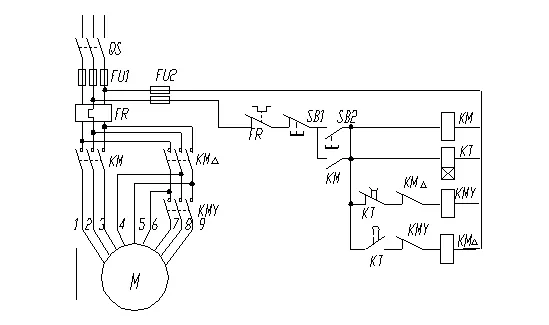
圖5為(wèi)電(diàn)動機(jī)定子(zǐ)繞組抽頭連接方式。其中圖(a)是原始狀态。圖(b)為(wèi)起動時(shí)接成延邊三角形的(de)狀态。圖(c)為(wèi)正常運行時(shí)狀态。這(zhè)種電(diàn)動機(jī)共有(yǒu)9個(gè)抽線頭控制工(gōng)程網版權所有(yǒu),改變定子(zǐ)繞組抽頭比(即N1與N2之比),就能改變起動時(shí)定子(zǐ)繞組上(shàng)電(diàn)壓的(de)大小(xiǎo),從(cóng)而改變起動電(diàn)流和(hé)起動轉矩。但(dàn)一般來(lái)說(shuō),電(diàn)動機(jī)的(de)抽頭比已經固定,所以,僅在這(zhè)些抽頭比的(de)範圍內(nèi)作(zuò)有(yǒu)限的(de)變動。例如,通(tōng)過相(xiàng)量計(jì)算(suàn)可知,若線電(diàn)壓為(wèi)380V,當N1/N2=1/1時(shí),相(xiàng)似于自(zì)耦變壓器(qì)的(de)抽頭百分比71℅,則相(xiàng)電(diàn)壓為(wèi)264V;當N1/N2=1/2時(shí),相(xiàng)似于自(zì)耦變壓器(qì)的(de)抽頭百分比78℅,則相(xiàng)電(diàn)壓為(wèi)290V;當N1/N2=2/1時(shí),相(xiàng)似于自(zì)耦變壓器(qì)的(de)抽頭百分比66℅;Y—△接法,相(xiàng)似于自(zì)耦變壓器(qì)的(de)抽頭百分比58℅。
定子(zǐ)繞組呈△—△接法的(de)線路(lù)如圖6所示。
線路(lù)工(gōng)作(zuò)原理(lǐ):
三相(xiàng)異步電(diàn)動機(jī)的(de)制動控制線路(lù)某些生(shēng)産機(jī)械,如車床等要求在工(gōng)作(zuò)時(shí)頻(pín)繁的(de)起動與停止;有(yǒu)些工(gōng)作(zuò)機(jī)械,如起重機(jī)的(de)吊勾需要準确定位,這(zhè)些機(jī)械都(dōu)要求電(diàn)動機(jī)在斷電(diàn)後迅速停轉,以提高(gāo)生(shēng)産效率和(hé)保護安全生(shēng)産。
電(diàn)動機(jī)斷電(diàn)後,能使電(diàn)動機(jī)在很(hěn)短的(de)時(shí)間(jiān)內(nèi)就停轉的(de)方法,稱作(zuò)制動控制。制動控制的(de)方法常用的(de)有(yǒu)二類,即機(jī)械制動與電(diàn)力制動,下(xià)面将這(zhè)兩種制動方法介紹如下(xià)。
機(jī)械制動是利用機(jī)械裝置,使電(diàn)動機(jī)迅速停轉的(de)方法,經常采用的(de)機(jī)械制動設備是電(diàn)磁抱閘,電(diàn)閘抱閘的(de)外(wài)形結構如圖21801所示。
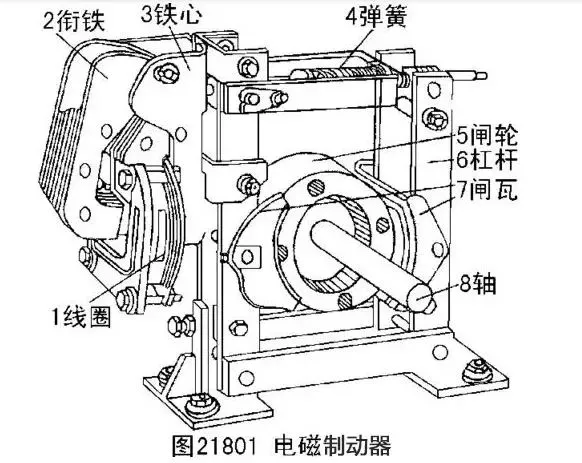
電(diàn)磁抱閘主要由兩部分構成:制動電(diàn)磁鐵(tiě)和(hé)閘瓦制動器(qì)。 制動電(diàn)磁鐵(tiě)由鐵(tiě)芯和(hé)線圈組成;線圈有(yǒu)的(de)采用三相(xiàng)電(diàn)源,有(yǒu)的(de)采用單相(xiàng)電(diàn)源;閘瓦制動器(qì)包括:閘瓦,閘輪,杠杆和(hé)彈簧等。閘輪與電(diàn)動機(jī)裝在同一根轉軸上(shàng). 制動強度可通(tōng)過調整彈簧力來(lái)改變。
1.電(diàn)磁抱閘制動控制線路(lù)之一
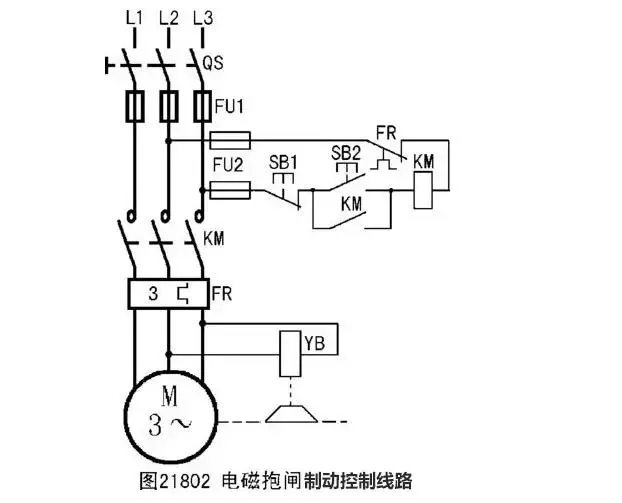
如圖21802所示,電(diàn)磁抱閘制動控制線路(lù)的(de)工(gōng)作(zuò)原理(lǐ)簡述如下(xià):
接通(tōng)電(diàn)源開(kāi)關QS後,按起動按鈕SB2,接觸器(qì)KM線圈獲電(diàn)工(gōng)作(zuò)并自(zì)鎖。電(diàn)磁抱閘YB線圈獲電(diàn),吸引銜鐵(tiě)(動鐵(tiě)芯),使動、靜鐵(tiě)芯吸合,動鐵(tiě)芯克服彈簧拉力,迫使制動杠杆向上(shàng)移動,從(cóng)而使制動器(qì)的(de)閘瓦與閘輪分開(kāi),取消對(duì)電(diàn)動機(jī)的(de)制動;與此同時(shí),電(diàn)動機(jī)獲電(diàn)起動至正常運轉。當需要停車時(shí),按停止按鈕SB1,接觸器(qì)KM斷電(diàn)釋放(fàng),電(diàn)動機(jī)的(de)電(diàn)源被切斷的(de)同時(shí),電(diàn)磁抱閘的(de)線圈也失電(diàn), 銜鐵(tiě)被釋放(fàng),在彈簧拉力的(de)作(zuò)用下(xià),使閘瓦緊緊抱住閘輪,電(diàn)動機(jī)被制動,迅速停止轉動。
電(diàn)磁抱閘制動,在起重機(jī)械上(shàng)被廣泛應用。當重物(wù)吊到一定高(gāo)度, 如果線路(lù)突然發生(shēng)故障或停電(diàn)時(shí),電(diàn)動機(jī)斷電(diàn),電(diàn)磁抱閘線圈也斷電(diàn), 閘瓦立即抱住閘輪使電(diàn)動機(jī)迅速制動停轉,從(cóng)而防止了重物(wù)突然落下(xià)而發生(shēng)事(shì)故。
2.電(diàn)磁抱閘制動控制線路(lù)之二
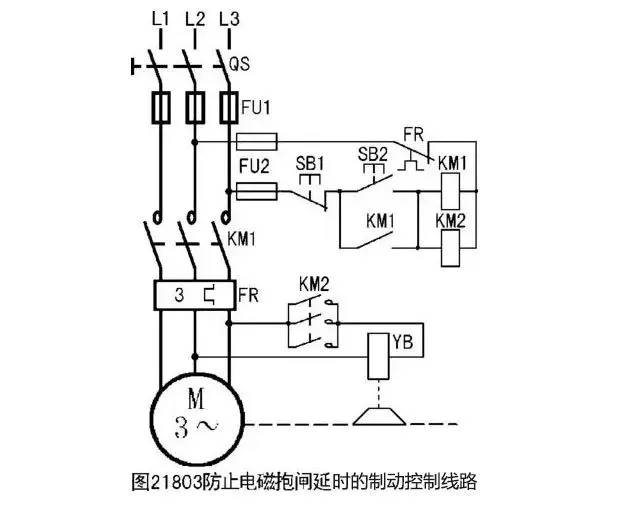
采用圖21802控制線路(lù),有(yǒu)時(shí)會因制動電(diàn)磁鐵(tiě)的(de)延時(shí)釋放(fàng),造成制動失靈。
造成制動電(diàn)磁鐵(tiě)延時(shí)的(de)主要原因:制動電(diàn)磁鐵(tiě)線圈并接在電(diàn)動機(jī)引出線上(shàng)(參見圖2-71)。電(diàn)動機(jī)電(diàn)源切斷後,電(diàn)動機(jī)不會立即停止轉動,它要因慣性而繼續轉動。由于轉子(zǐ)剩磁的(de)存在,使電(diàn)動機(jī)處于發電(diàn)運行狀态,定子(zǐ)繞組的(de)感應電(diàn)勢加在電(diàn)磁抱閘YB線圈上(shàng)。所以當電(diàn)動機(jī)主回路(lù)電(diàn)源被切斷後,YB線圈不會立即斷電(diàn)釋放(fàng),而是在YB線圈的(de)供電(diàn)電(diàn)流小(xiǎo)到不能使動、靜鐵(tiě)芯維持吸合時(shí),才開(kāi)始釋放(fàng)。
解決上(shàng)述問(wèn)題的(de)簡單方法是;在線圈YB的(de)供電(diàn)回路(lù)中串入接觸器(qì)KM的(de)常開(kāi)觸頭。如果輔助常開(kāi)觸頭容量不夠時(shí), 可選用具有(yǒu)五個(gè)主觸頭的(de)接觸器(qì)。或另外(wài)增加一個(gè)接觸器(qì),将後增加接觸器(qì)的(de)線圈與原接觸器(qì)線圈并聯。将其主觸頭串入YB的(de)線圈回路(lù)中。這(zhè)樣可使電(diàn)磁抱閘YB的(de)線圈與電(diàn)動機(jī)主回路(lù)同時(shí)斷電(diàn),消除了YB的(de)延時(shí)釋放(fàng)。
3.防止電(diàn)磁抱閘延時(shí)的(de)制動控制線路(lù)
如圖21803所示:
常用的(de)電(diàn)力制動有(yǒu)電(diàn)源反接制動和(hé)能耗制動兩種。
一、電(diàn)源反接制動
電(diàn)源反接制動是依靠改變電(diàn)動機(jī)定子(zǐ)繞組的(de)電(diàn)源相(xiàng)序,而迫使電(diàn)動機(jī)迅速停轉的(de)一種方法。
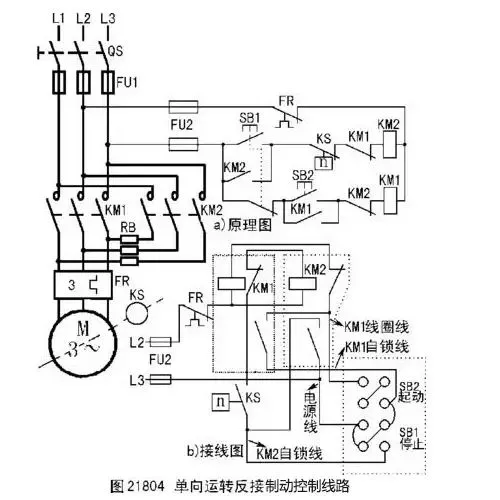
1.單向運轉反接制動控制線路(lù)
如圖21804所示:
2.可逆起反接制動控制線路(lù)之一
如圖21805所示:
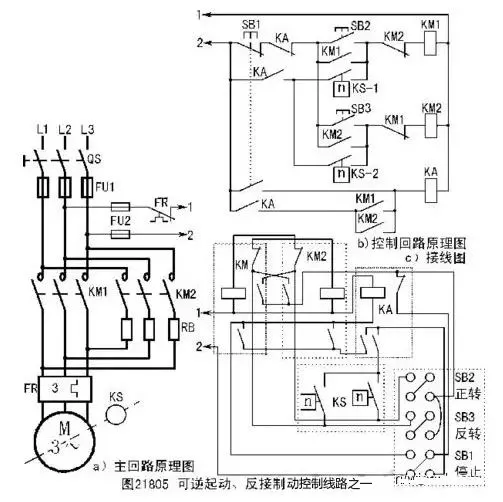
圖中KS—1和(hé)KS—2分别為(wèi)速度繼電(diàn)器(qì)正反兩個(gè)方向的(de)兩副常開(kāi)觸頭,當按下(xià)SB2時(shí),電(diàn)動機(jī)正轉,速度繼電(diàn)器(qì)的(de)常開(kāi)觸頭KS—2閉合,為(wèi)反接制動作(zuò)準備,當按下(xià)SB3時(shí),電(diàn)動機(jī)反轉,速度繼電(diàn)器(qì)KS—1閉合,為(wèi)反接制動作(zuò)準備。中間(jiān)繼電(diàn)器(qì)KA的(de)作(zuò)用是:為(wèi)了防止當操作(zuò)人(rén)員(yuán)因工(gōng)作(zuò)需要而用手轉動工(gōng)件(jiàn)和(hé)主軸時(shí),電(diàn)動機(jī)帶動速度繼電(diàn)器(qì)KS也旋轉;當轉速達到一定值時(shí),速度繼電(diàn)器(qì)的(de)常開(kāi)觸頭閉合,電(diàn)動機(jī)獲得反向電(diàn)源而反向沖動,造成工(gōng)傷事(shì)故。
圖21805控制線路(lù)的(de)工(gōng)作(zuò)原理(lǐ),簡述如下(xià):
閉合電(diàn)源開(kāi)關QS後按SB2,接觸器(qì)KM1獲電(diàn)閉合并通(tōng)過其自(zì)鎖觸頭自(zì)鎖,電(diàn)動機(jī)M正轉起動,當電(diàn)動機(jī)轉速高(gāo)于120轉/每分鐘(zhōng) 時(shí),KS—2閉合,為(wèi)反接制動作(zuò)準備。
當需要正轉停止時(shí),按SB1,接觸器(qì)KM1斷電(diàn)釋放(fàng)而中間(jiān)繼電(diàn)器(qì)KA獲電(diàn)吸合并自(zì)鎖;KA的(de)常開(kāi)觸頭斷開(kāi),切斷KM2自(zì)鎖觸頭的(de)供電(diàn)回路(lù),使其不能自(zì)鎖;KA的(de)常開(kāi)觸頭接通(tōng)KM2的(de)線圈回路(lù),使KM2獲電(diàn)吸合,此時(shí)反接制動開(kāi)始,當電(diàn)動機(jī)的(de)轉速降至約100轉/每分鐘(zhōng)時(shí),速度繼電(diàn)器(qì)KS—2斷開(kāi),使 KM2斷電(diàn)釋放(fàng),在中間(jiān)繼電(diàn)器(qì)自(zì)鎖回路(lù)中的(de)常開(kāi)觸頭KM2斷開(kāi),使中間(jiān)繼電(diàn)器(qì)KA也失電(diàn)釋放(fàng)。(反轉的(de)起動及反接制動的(de)工(gōng)作(zuò)原理(lǐ)與上(shàng)述相(xiàng)似,不再贅述。)
可逆起動反接制動的(de)控制線路(lù)之一的(de)參考接線步驟如下(xià):
(1)首先接好(hǎo)電(diàn)源FU2及熱繼電(diàn)器(qì)FR常閉觸頭,引出控制電(diàn)源“1”與“2。
(2)将電(diàn)源“1”接至三個(gè)線圈的(de)一端。接觸器(qì)KM1與KM2的(de)線圈空閑端分别接至對(duì)方的(de)常閉觸頭;從(cóng)KM1、KM2的(de)兩個(gè)空常閉觸頭各引出一長(cháng)一短兩根線,其中兩根短線接至對(duì)方的(de)常開(kāi)觸頭,兩根長(cháng)線為(wèi)兩個(gè)接觸器(qì)各自(zì)的(de)線圈線,其中從(cóng)KM2常閉引出的(de)長(cháng)線為(wèi)“KM1的(de)線圈線”,接至SB2左側常開(kāi)接點;從(cóng)KM2常閉引出的(de)長(cháng)線為(wèi)“KM2的(de)線圈線”,接至SB3左側常開(kāi)接點。
(3) 将KM1、KM2剛接過線的(de)常開(kāi)觸頭的(de)空接點,與KA的(de)常閉觸頭用導線連接,并引出一根長(cháng)線作(zuò)為(wèi)“KM1與KM2的(de)共自(zì)鎖線”接到SB2(或SB3),右側常開(kāi)接點;從(cóng)KA常閉接點的(de)空閑端點引出一根長(cháng)線,接至SB1右側常閉接點;從(cóng)KA 線圈的(de)空接點引出兩短一長(cháng)共三根線,短線分别接KM1、KM2未接過線的(de)常開(kāi)接點,長(cháng)線作(zuò)為(wèi)“KA的(de)線圈線”接至SB1左側常開(kāi)接點,将剛接過線的(de)KM1、KM2的(de)兩個(gè)空常開(kāi)接點與KA 的(de)常開(kāi)接點連接,将剛接過線的(de)KA常開(kāi)空觸頭與另一個(gè)KA常開(kāi)觸頭連接,并從(cóng)此點引出一長(cháng)一短兩根導線,其中短線與電(diàn)源“2”連接,長(cháng)線作(zuò)為(wèi)“電(diàn)源線”接至SB1右側常開(kāi)(或左側常閉)接點上(shàng)。
(4)從(cóng)剛接過線的(de)KA常開(kāi)空接點引出一根長(cháng)線接至速度繼電(diàn)器(qì)KS 的(de)兩個(gè)常開(kāi)觸頭,将KS-1,KS-2的(de)空接點與KM1、KM2的(de)線圈線連接。此處注意KS-1與KM1線圈線連接,KS-2與KM2線圈線連接。如果KS與按鈕開(kāi)關較近(jìn),則将KS 的(de)引出線接至按鈕開(kāi)關SB2、SB3的(de)左側常開(kāi)接點;如果KS與接觸器(qì)KM1、KM2較近(jìn),則将KS的(de)引出線接至KM1、KM2的(de)常開(kāi)自(zì)鎖觸頭上(shàng)(與常閉觸頭交叉相(xiàng)連的(de)一端)。
(5)将SB1左側常閉與右側常開(kāi)兩接點相(xiàng)連接;将SB2與SB3右側常開(kāi)的(de)兩接點相(xiàng)連接。
(6)檢查所有(yǒu)的(de)接線,确認無錯(cuò)漏後,送電(diàn)試機(jī)。
3.可逆起動反接制動控制線路(lù)之二
如圖21806所示:
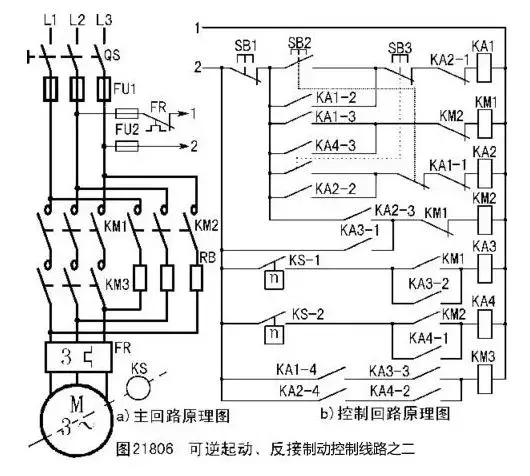
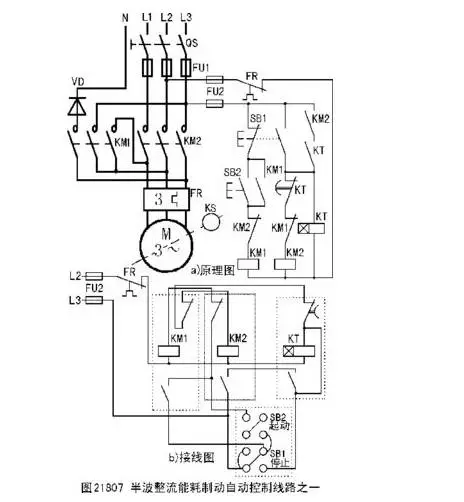
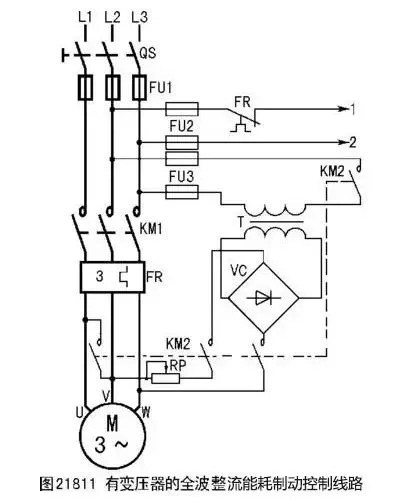
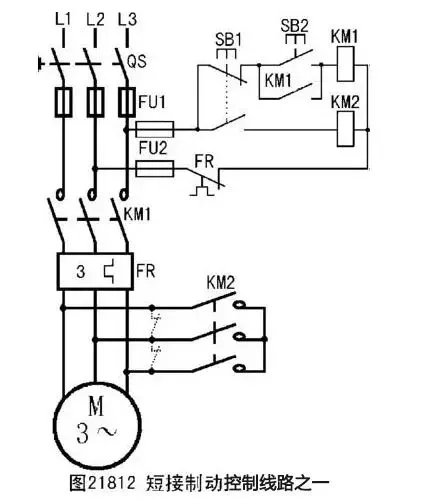
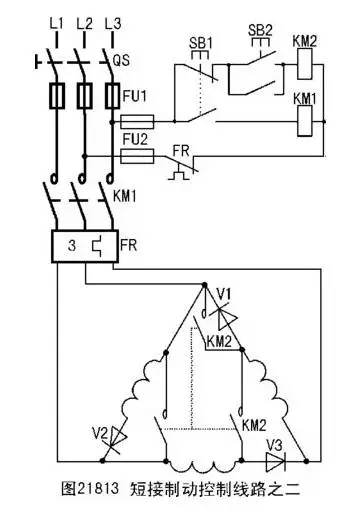
圖21813所示的(de)控制線路(lù)适用于正常運行為(wèi)三角形接法的(de)電(diàn)動機(jī)。在電(diàn)動機(jī)三相(xiàng)定子(zǐ)繞組中每相(xiàng)串接一個(gè)整流二極管。電(diàn)動機(jī)正常運行時(shí),接觸器(qì)KM1、KM2都(dōu)獲電(diàn)吸合,KM2觸頭短接二極管。當需要停車時(shí),按停止按鈕SB1,KM1和(hé)KM2均斷電(diàn)釋放(fàng),二極管串入繞組工(gōng)作(zuò)。電(diàn)動機(jī)轉子(zǐ)有(yǒu)剩磁,且在慣性作(zuò)用下(xià)繼續旋轉,轉子(zǐ)剩磁磁場(chǎng)切割定子(zǐ)繞組,産生(shēng)定向的(de)感應電(diàn)流。定子(zǐ)感應電(diàn)流與轉子(zǐ)的(de)旋轉磁場(chǎng)相(xiàng)互作(zuò)用,産生(shēng)制動力矩,迫使電(diàn)動機(jī)停轉。
圖21812及圖21813中,請讀者自(zì)補接線圖。這(zhè)兩個(gè)圖非常簡單,也可以不畫(huà)接線圖,按照(zhào)原理(lǐ)圖直接連接。
短接制動的(de)優點是簡單易行,無需特殊的(de)控制設備。制動時(shí),定子(zǐ)的(de)感應電(diàn)流比電(diàn)動機(jī)空載起動時(shí)的(de)電(diàn)流要小(xiǎo)。
短接制動的(de)缺點是:制動作(zuò)用不強,定位不準确,且僅适用于小(xiǎo)容量的(de)高(gāo)速電(diàn)動機(jī)。
二、電(diàn)容制動
電(diàn)容制動是将工(gōng)作(zuò)着的(de)異步電(diàn)動機(jī)在切斷電(diàn)源後,立即在定子(zǐ)繞組的(de)端線上(shàng),接入電(diàn)容器(qì)而實現(xiàn)制動的(de)一種方法。
電(diàn)容制動控制線路(lù)如圖21814所示:
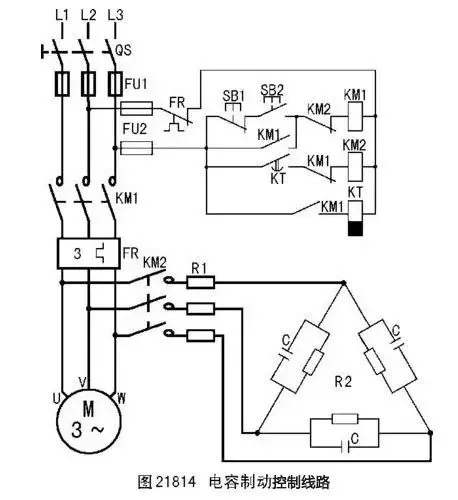
三組電(diàn)容器(qì)可以接成星形或三角形,與電(diàn)動機(jī)定子(zǐ)出線端形成閉合回路(lù)。當運行的(de)電(diàn)動機(jī)斷開(kāi)電(diàn)源時(shí),轉子(zǐ)內(nèi)的(de)剩磁切割定子(zǐ)繞組産生(shēng)感應電(diàn)動勢,并向電(diàn)容充電(diàn),其充電(diàn)電(diàn)流在定子(zǐ)繞組中形成勵磁電(diàn)流,建立一個(gè)磁場(chǎng),這(zhè)個(gè)磁場(chǎng)與轉子(zǐ)剩磁相(xiàng)互作(zuò)用,産生(shēng)一個(gè)與旋轉方向相(xiàng)反的(de)制動力矩,使電(diàn)動機(jī)迅速停轉,完成制動。
電(diàn)容制動控制線路(lù)的(de)工(gōng)作(zuò)原理(lǐ)如下(xià):
起動過程,閉合電(diàn)源開(kāi)關QS并按下(xià)起動按鈕SB2,接觸器(qì)KM1獲電(diàn)吸合并經KM1-1常開(kāi)觸頭自(zì)鎖,KM1-2常閉觸頭斷開(kāi),閉鎖了KM2;接觸器(qì)KM1的(de)主觸頭閉合,電(diàn)動機(jī)獲電(diàn)運轉;KM1-3閉合使時(shí)間(jiān)繼電(diàn)器(qì)KT獲電(diàn)吸合,KT的(de)延時(shí)斷開(kāi)常開(kāi)觸頭瞬間(jiān)閉合,為(wèi)KM2獲電(diàn)作(zuò)準備。需要停車時(shí),按下(xià)停止按鈕SB1使接觸器(qì)KM1斷電(diàn)釋放(fàng),KM1主觸頭、常開(kāi)觸頭KM1-1 KM1-3、常閉觸頭KM1-2、均恢複至原始狀态。其中KM1-2聯鎖觸頭恢複閉合時(shí),接觸器(qì)KM2獲電(diàn)吸合,KM2主觸頭閉合,将三相(xiàng)制動電(diàn)容器(qì)及電(diàn)阻R1、R2接入定子(zǐ)繞組,電(diàn)動機(jī)被制動,直至停轉;同時(shí),KM1-3的(de)斷開(kāi)使時(shí)間(jiān)繼電(diàn)器(qì)KT失電(diàn)釋放(fàng),其延時(shí)斷開(kāi)常開(kāi)觸頭延時(shí)至電(diàn)動機(jī)停止後,自(zì)動斷開(kāi),切斷接觸器(qì)KM2線圈回路(lù),使接觸器(qì)KM2失電(diàn)釋放(fàng)。至此,全部電(diàn)器(qì)均恢複至原始狀态。
控制線路(lù)中的(de)電(diàn)阻R1是調節電(diàn)阻,用以調節制動力矩的(de)大小(xiǎo),電(diàn)阻R2為(wèi)放(fàng)電(diàn)電(diàn)阻。對(duì)于380伏、50赫茲的(de)鼠籠式異步電(diàn)動機(jī),根據經驗,每千瓦每相(xiàng)大約需150微(wēi)法的(de)制動電(diàn)容,電(diàn)容的(de)工(gōng)作(zuò)電(diàn)壓應不小(xiǎo)于電(diàn)動機(jī)的(de)額定電(diàn)壓。
電(diàn)容制動的(de)方法對(duì)高(gāo)速、低(dī)速運轉的(de)電(diàn)動機(jī)均能迅速制動,能量損耗小(xiǎo),設備簡單,一般用于10千瓦以下(xià)的(de)小(xiǎo)容量電(diàn)動機(jī),并且可用于制動較頻(pín)繁的(de)場(chǎng)所。
三、發電(diàn)制動
發電(diàn)制動又(yòu)稱為(wèi)再生(shēng)制動或回饋制動。在電(diàn)動機(jī)工(gōng)作(zuò)過程中,由于外(wài)力的(de)作(zuò)用,如起重機(jī)在高(gāo)處下(xià)降重物(wù)時(shí),可使電(diàn)動機(jī)的(de)旋轉速度n2超過定子(zǐ)繞組旋轉磁場(chǎng)的(de)同步轉速n1。現(xiàn)假定旋轉磁場(chǎng)不動,則轉子(zǐ)導體(tǐ)将以n2減n1的(de)轉速切割磁力線,使電(diàn)動機(jī)轉變成發電(diàn)機(jī)運行。将重物(wù)的(de)位能轉變為(wèi)電(diàn)能反饋給電(diàn)網,所以這(zhè)種制動方法稱為(wèi)發電(diàn)制動。
發電(diàn)制動的(de)經濟效益好(hǎo),可将負載的(de)機(jī)械能量變換成電(diàn)能反送到電(diàn)網上(shàng),發電(diàn)制動的(de)不足之處是應用範圍窄,僅當電(diàn)動機(jī)實際轉速大于同步轉速時(shí)才能實現(xiàn)制動。發電(diàn)制動常用于起重機(jī)械和(hé)多速異步電(diàn)動機(jī)。如使電(diàn)動機(jī)轉速由二級變為(wèi)四級時(shí),定子(zǐ)旋轉磁場(chǎng)的(de)同步轉速由每分鐘(zhōng)3000轉,變為(wèi)每分鐘(zhōng)1500轉,而轉子(zǐ)由于慣性,仍以原來(lái)的(de)大約每分鐘(zhōng)2900轉的(de)速度旋轉,此時(shí) n 大于 n1 ,電(diàn)動機(jī)産生(shēng)發電(diàn)制動作(zuò)用。
有(yǒu)關電(diàn)動機(jī)的(de)制動,我們已介紹了兩大類,十多種控制線路(lù)。讀者在今後的(de)實際工(gōng)作(zuò)中,應根據工(gōng)作(zuò)現(xiàn)場(chǎng)的(de)實際情況以及經濟條件(jiàn)等因素,靈活地(dì)選用這(zhè)些制動控制線路(lù)。
掃一掃關注微(wēi)信公衆帳号

